Nickel contamination can render soils infertile at levels that are currently impractical to treat. Researchers at UMass Amherst are looking at how plants can help these soils and source nickel for the growing EV market.
Phytoremediation is the use of plants that preferentially hyperaccumulate certain contaminants to clean the soil. When those contaminants are also critical materials, you get phytomining. Starting with Camelina sativa, the researchers are looking to enhance its preference for nickel accumulation with genes from the even more adept hyperaccumulator Odontarrhena to have a quick-growing plant that can be a nickel feedstock as well as produce seeds containing oil for biofuels.
Despite being able to be up to 3% Ni by weight, Odontarrhena was ruled out as a candidate itself due to its slow-growing nature and that it is invasive to the United States. The researchers are also looking into what soil amendments can best help this super Camelina sativa best achieve its goals. It’s no panacea for expected nickel demand, but they do project that phytomining could provide 20-30% of our nickel needs for 50 years, at which point the land could be turned back over to other uses.
Recycling things already in technical cycles will be important to a circular economy, but being able to remove contaminants from the environment’s biological cycles and place them into a safer technical cycle instead of just burying them will be a big benefit as well. If you want learn about a more notorious heavy metal, checkout our piece on the blessings and destruction wrought by lead.
Typically, if you’re shooting 35 mm film, you’re using it in an old point-and-shoot or maybe a nice SLR. You might even make some sizeable prints if you take a particularly good shot. But you can get altogether weirder with 35 mm if you like, as [Socialmocracy] demonstrates with his “extreme sprocket hole photography” project (via Petapixel).
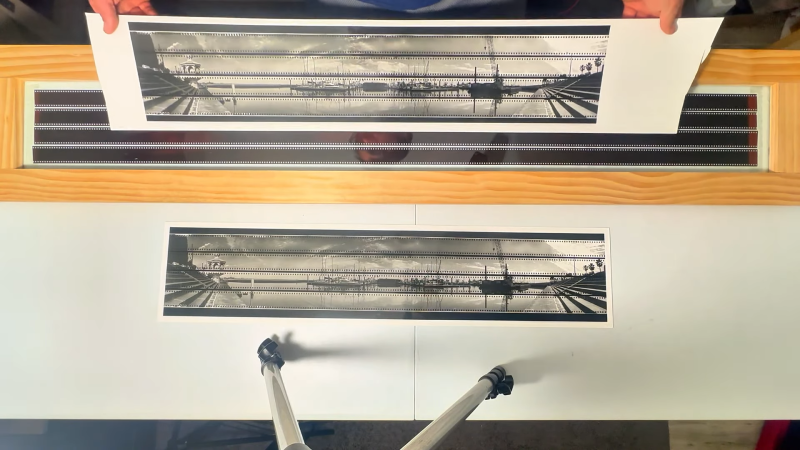
The concept is simple enough. [Socialmocracy] wanted to expose four entire rolls of 35 mm film all at the same time in one single shot. To be absolutely clear, we’re not talking about exposing a frame on each of four rolls at once. We’re talking about a single exposure covering the entire length of all four films, stacked one on top of the other.
To achieve this, an old-school Cirkut No.6 Outfit camera was pressed into service. It’s a large format camera, originally intended for shooting panoramas. As the camera rotated around under the drive of a clockwork motor, it would spool out more film to capture an image.
[Socialmocracy] outfitted the 100-year-old camera with a custom 3D-printed spool that could handle four rolls of film at once, rather than its usual wide single sheet of large format film. This let the camera shoot its characteristic panoramas, albeit spread out over multiple rolls of film, covering the sprocket holes and all. Hence the name—”extreme sprocket hole photography.”
It’s a neat build, and one that lets [Socialmocracy] use more readily available film to shoot fun panoramas with this old rig. We’ve featured some other great film camera hacks over the years, too, like this self-pack Polaroid-style film. Video after the break.
We like drinking out of glass. In many ways, it’s an ideal material for the job. It’s hard-wearing, and inert in most respects. It doesn’t interact with the beverages you put in it, and it’s easy to clean. The only problem is that it’s rather easy to break. Despite its major weakness, glass still reigns supreme over plastic and metal alternatives.
But what if you could make glassware that didn’t break? Surely, that would be a supreme product that would quickly take over the entire market. As it turns out, an East German glassworks developed just that. Only, the product didn’t survive, and we lumber on with easily-shattered glasses to this day. This is the story of Superfest.
Harder, Better, Glasser, Stronger
It all started in the German Democratic Republic in the 1970s; you might know it better as East Germany. The government’s Council of Ministers deemed it important to develop higher-strength glass. Techniques for the chemical strengthening of glass were already known by the 1960s, and work on developing the technology further began in earnest.
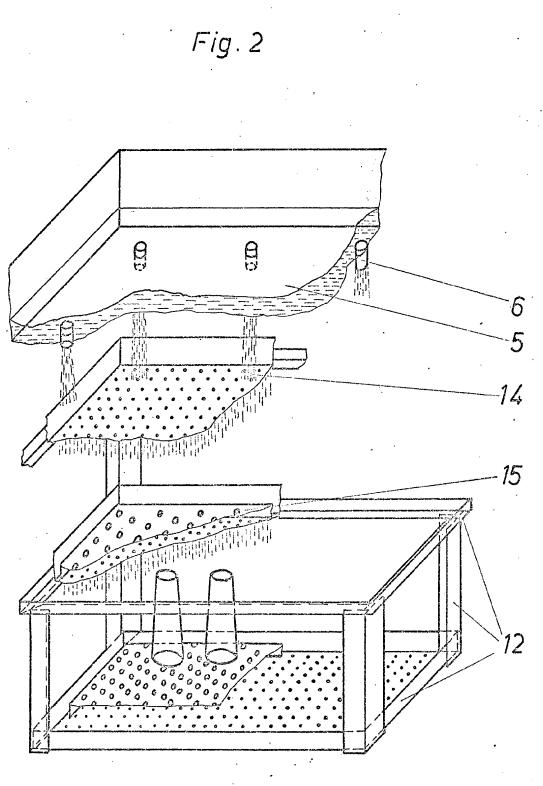
The patent goes into great detail on design of the production line, indicating how perforated plates create a “rain” of molten potassium salt upon the glassware. Credit: patent
These efforts came to fruition in the form of a patent filed on the 8th of August, 1977. It was entitled Verfahren und Vorrichtung Zur Verfestigung Von Glaserzeugnissen Durch Ioenenaustausch—or, translated to English—Process and Apparatus for Strengthening Glassware By Ion Exchange. The patent regarded an industry-ready process, which was intended for use in the production of hollow glass vessels—specifically, drinking glassware.
The researchers understood that glasses typically broke in part due to microscopic cracks in the material, which are introduced in the production process. These microcracks could be mitigated by replacing the sodium ions in the surface of the glass with larger potassium ions. The larger ions thus cause a state of compression in the surface layer. Glass is far more capable of resisting compression rather than tension. The high compressive stresses baked into the material help resist tension forces that occur during impact events, thus making the material far more resistant to breakage.
The process of exchanging sodium ions in the glass with potassium ions was simple enough. The patent outlined a process for raining down a molten potassium salt solution onto the glassware, which would harden the outside surface significantly. This process was chosen for multiple reasons. It was desired to avoid immersing glassware into a huge bath of molten potassium salt, as the large bath of hot material would present safety hazards. There were also concerns that excessive time spent at high temperatures following immersion would lead to a relaxation of the crucial compressive stresses that built up in the glass from the ion exchange. Interior surfaces of the glassware could also be hardened by rotating the glasses on a horizontal axis under the “salt rain” so they were also exposed to the potassium salt to enable the ion exchange.
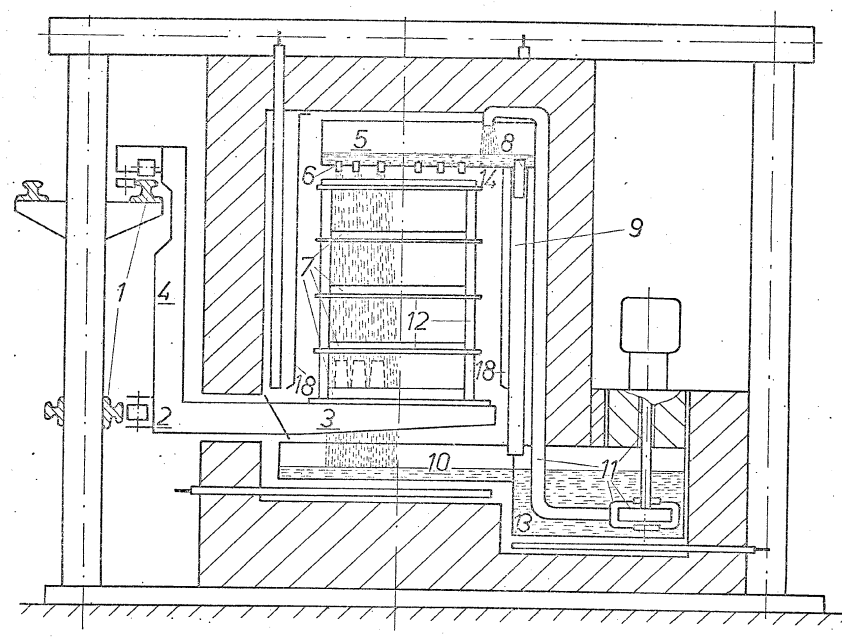
While the design of apparatus to strengthen drinking glassware is novel, the fundamental chemical process is not dissimilar to that used in the production of Gorilla Glass. Credit: patent
Recognizing the value of this patent, the Council of Ministers fast-tracked the technology into commerical production at the Sachsenglas Schwepnitz factory. The glassware was originally named CEVERIT, which was a portmanteau of the German words chemisch verfestigt—meaning “chemically solidified.” It also wore the name CV-Glas for the same reason. Production began in earnest in 1980, primarily centered around making beer glasses for hospitality businesses in East German—bars, restaurants, and the like. The glass instantly lived up to its promise, proving far more durable in commercial use. While not completely indestructible, the glasses were lasting ten to fifteen times longer than traditional commercial glassware.
A Superfest glass marked for 250 mL. Today, the only real way to source Superfest glassware is to buy used. Much remains in commercial use. Credit: Kaethe17, CC BY-SA 4.0
Despite the political environment of the time, there were hopes to expand sales to the West. On the urging of sales representative Eberhard Pook, the glasses were referred to by the name Superfest. The aim was to avoid negative connotations of “chemicals” in the name when it came to drinking glasses. Despite efforts made at multiple trade fairs, however, international interest in the tough glassware was minimal. Speaking to ZEITMagazin in 2020, Pook noted the flat response from potential customers. “We built a wall where we stacked the glasses… Look at it, it’s unbreakable!” says Pook, translated from the original German. “No reaction.” He was told that the material’s strength was also a great weakness from a sales perspective. “At Coca Cola, for example, they said, why should we use a glass that doesn’t break, we make money with our glasses,” he explained. “The dealers understandably said, who would cut off the branch they’re sitting on?”
Production nevertheless continued apace, with 120 million glasses made for the domestic market. Hardened glassware was manufactured in all shapes and sizes, covering everything from vases to tea cups and every size of beer glass. Stock eventually began piling up at the factory, as restaurants and bars simply weren’t ordering more glassware. Their chemically-strengthened glasses were doing exactly what they were supposed to do, and replacements weren’t often necessary.
Superfest glass was also used in the production of vases and other hollow glass items. Credit: Mernst1806/TeKaBe, CC BY-SA 4.0
Regardless, the future was unkind to Superfest. Urban legend says that the reunification of Germany was the beginning of the end, but it’s not entirely true. As covered by ZEITMagazin, the production of Superfest glassware was ended in July 1990 because it simply wasn’t profitable for the company. Production of other glassware continued, but the chemically-hardened line was no more. The patent for the process was allowed to lapse in 1992, and pursued no more.
The question remains why we don’t have chemically-hardened glassware today. The techniques behind Superfest are scarcely different to those used in Gorilla Glass or other chemically-strengthened glasses. The manufacturing process is well-documented, and the world is full of factories that ignore any concept of intellectual property if there was even an issue to begin with. Indeed, a German crowdfunding effort even attempted to replicate the material—only to fall into insolvency this year.
It seems that either nobody can make stronger drinking glasses, or nobody wants to—perhaps because, as Superfest seemed to indicate—there simply isn’t any money in it in the long term. It’s a shame, because the world demands nice things—and that includes beer glasses that last seemingly forever.
QR codes are used just about everywhere now, for checking into venues, ordering food, or just plain old advertising. But what about data storage? It’s hardly efficient, but if you want to store your files in a ridiculous paper format—there’s a way to do that, too!
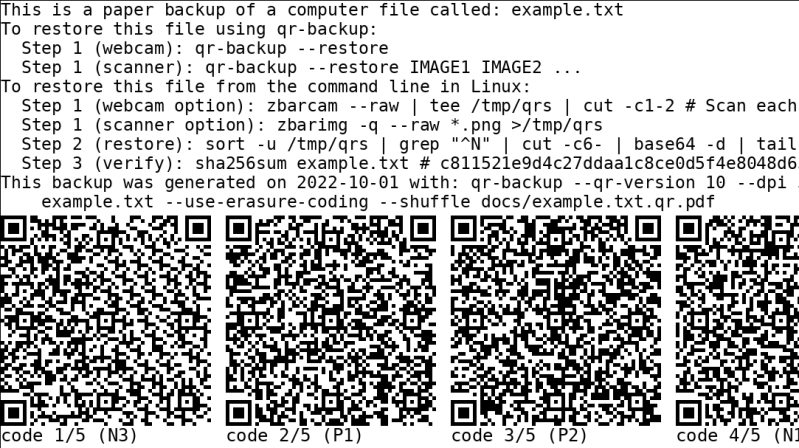
QR-Backup was developed by [za3k], and is currently available as a command-line Linux tool only. It takes a file or files, and turns them into a “paper backup”—a black-and white PDF file full of QR codes that’s ready to print. That’s legitimately the whole deal—you run the code, generate the PDF, then print the file. That piece of paper is now your backup. Naturally, qr-backup works in reverse, too. You can use a scanner or webcam to recover your files from the printed page.
Currently, it achieves a storage density of 3KB/page, and [za3k] says backups of text in the single-digit megabyte range are “practical.” You can alternatively print smaller, denser codes for up to 130 KB/page.
Is it something you’ll ever likely need? No. Is it super neat and kind of funny? Yes, very much so.
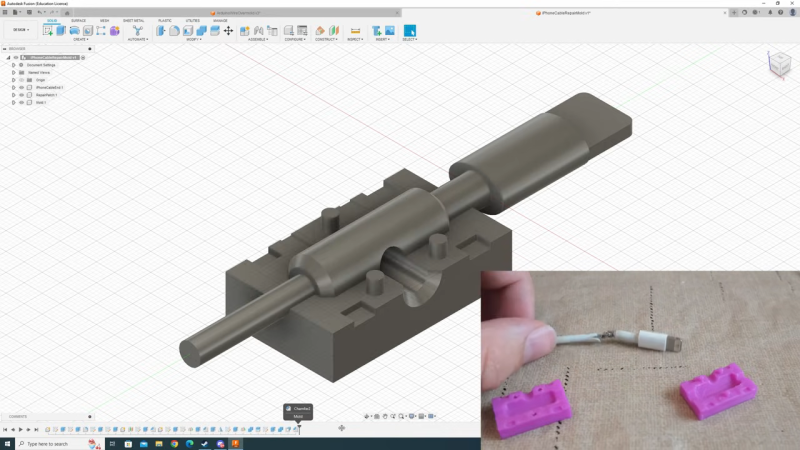
We’ve said it before and we’ll say it again: water always finds a way in. That’s particularly problematic for things like wire splices in damp environments, something that no amount of electrical tape is going to help. Heat shrink tubing might be your friend here, but for an electrically isolated and mechanically supported repair, you may want to give over-molding with a hot glue gun a try.
The inspiration for [Print Practical]’s foray into over-molding came from a video that’s making the rounds showing a commercially available tool for protecting spliced wires in the automotive repair trade. It consists of a machined aluminum mold that the spliced wires fit into and a more-or-less stock hot glue gun, which fills the mold with melted plastic. [Print Practical] thought it just might be possible to 3D print custom molds at home and do it himself.
His first attempt didn’t go so well. As it turns out, hot glue likes to stick to things — who knew? — including the PETG mold he designed. Trying to pry apart the mold after injection was a chore, and even once he got inside it was clear the glue much preferred to stay in the mold. Round two went much better — same wire, same mold, but now with a thin layer of vegetable oil to act as a release agent. That worked like a charm, with the over-mold standing up to a saltwater bath with no signs of leaking. [Print Practical] also repaired an iPhone cable that has seen better days, providing much-needed mechanical support for a badly frayed section.
This looks like a fantastic idea to file away for the future, and one that’s worth experimenting with. Other filament types might make a mold better able to stand up to the hot glue, and materials other than the ethylene-vinyl acetate copolymer found in most hot glue sticks might be explored. TPU over-molds, anyone? Or perhaps you can use a printer as an injector rather than the glue gun.
All photos by Jacopo La Forgia, courtesy of Eva Fàbregas, National Museums in Berlin, and Hamburger Bahnhof–National Gallery of the Present
Bulbous, biomorphic sculptures in lavender, tangerine, and blush pink rove throughout the airy Hamburger Bahnhof in Berlin. The largest solo exhibition to date of Barcelona-born artist Eva Fàbregas, Devouring Lovers brings massive, bulging works to the industrial hall, juxtaposing the cold iron structures with soft, pudgy forms. Inviting in color and grotesque in shape, the organic, monstrous sculptures appear alive, as if they could grow and swallow up the remaining space, viewers and all.
In a recent interview, Fàbregas shares that the interactions between space and the body continually inform her thinking and how she conceptualizes a piece. “It’s about the architecture. It’s about those masses that you put inside the architecture. It’s about the humans moving around the architecture,” she says. “For me, my sculptures are not just themselves, it’s all the things that happen in the same space that affect that installation.”
Devouring Lovers is on view through January 14, 2024. You can find more from Fàbregas on Instagram.